EN
Raspberry PI - how to use ultrasonic rangefinder with c++ (cpp)?
4
points
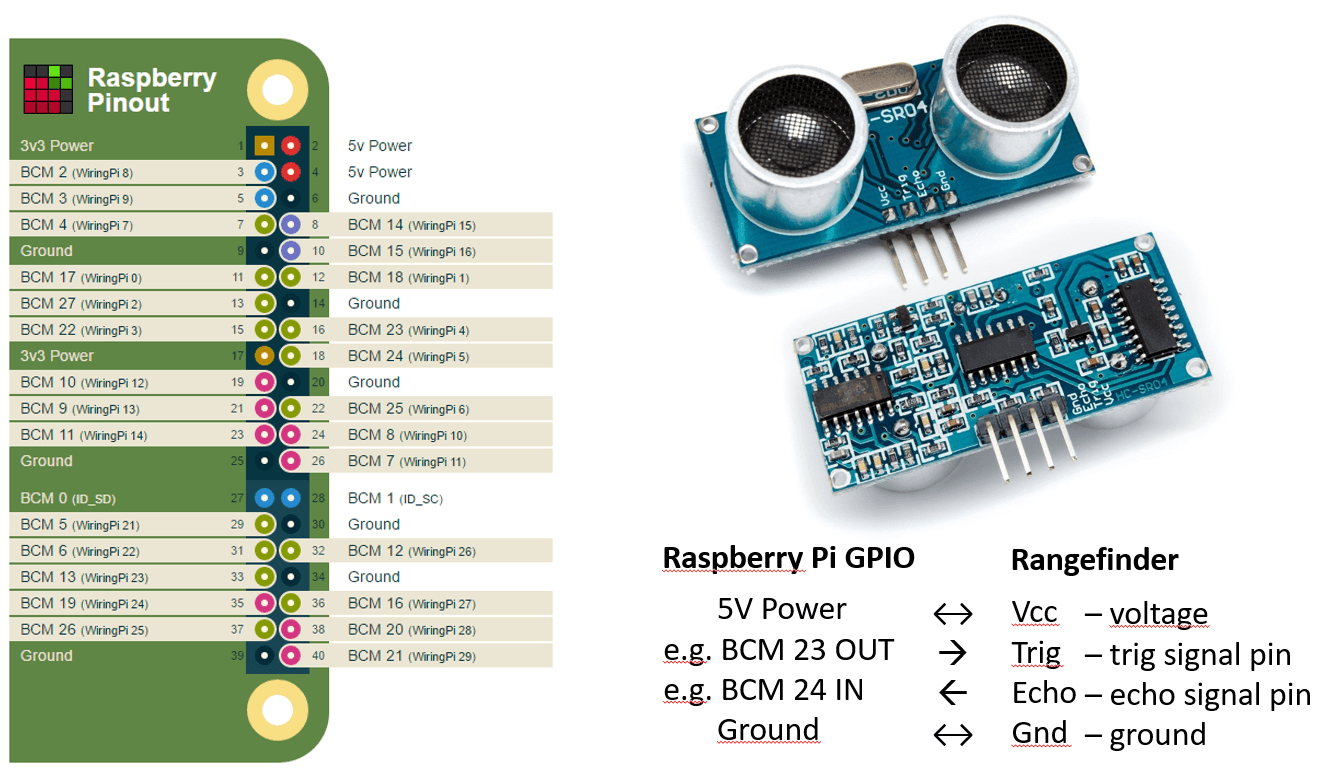
1. Connect rangefinder to Raspberry PI:
2. Download and install PiGPIO library to use GPIO:
$ wget abyz.me.uk/rpi/pigpio/pigpio.zip
$ unzip pigpio.zip
$ cd PIGPIO
$ make
$ sudo make install
$ rm pigpio.zip
$ sudo rm -rf PIGPIO
Note: for more details read official webpage: http://abyz.me.uk/rpi/pigpio/download.html
3. Create program.cpp file:
#include <pigpio.h>
#include <iostream>
#include <time.h>
#include <stdlib.h>
#include <sys/time.h>
using namespace std;
struct timeval tv;
double getTime()
{
gettimeofday(&tv, NULL);
return (double)tv.tv_sec + (double)tv.tv_usec * 0.000001;
}
// https://en.wikipedia.org/wiki/Speed_of_sound
// https://www.google.com/search?q=343+m%2Fs+to+cm%2Fs&oq=343+m%2Fs+to+cm%2Fs&aqs=chrome..69i57j6.443j0j9&sourceid=chrome&ie=UTF-8
int coefficient = 17150; // it should be selected experimentally - it is half of speed of sound in air in cm/s
int TRIG = 23; // BCM/GPIO pin number
int ECHO = 24; // BCM/GPIO pin number
void initializePins()
{
gpioSetMode(TRIG, PI_OUTPUT);
gpioSetMode(ECHO, PI_INPUT);
}
bool waitValue(int value, int limit = 10000) // use 1000000 to increase measurement distance
{
for(int i = 0; gpioRead(ECHO) == value; ++i)
{
if(i >= limit)
return false;
}
return true;
}
double detectDistance()
{
gpioWrite(TRIG, 0); // reset rangefinder state
usleep(500000); // wait for reset state - use 100000 to speedup program
gpioWrite(TRIG, 1); // hi state runs rangefinder measurement
usleep(10); // 10 us of hi level is necessary to start measurement - depended on rangefinder model
gpioWrite(TRIG, 0); // prepare rangefinder for measurement
if(waitValue(0)) // wait until lo level is achieved on echo pin
{
double pulseStart = getTime();
if(waitValue(1)) // wait until hi level is achieved on echo pin - hi level duration is proportional to distance
{
double pulseEnd = getTime();
double duration = pulseEnd - pulseStart;
double distance = duration * coefficient;
return distance;
}
}
cout << "Measurement error!";
// Troubleshooting:
// - check correctness of pin connection,
// - check supply in case of many devices connected,
// - check maximal supported distance by rangefinder
return 0.0 / 0.0;
}
int main ()
{
if(gpioInitialise() < 0)
cout << "PIGPIO initialisation failure!" << endl;
else
{
cout << "PIGPIO initialisation success!" << endl;
initializePins();
for(int i = 0; i < 100; ++i) // for example: 100 measurements
{
double distance = detectDistance();
cout << "Distance: " << distance << "cm" << endl;
}
gpioTerminate();
}
return 0;
}
4. Complile program
$ gcc -o program -lpigpio -lpthread -lrt program.cpp
5. Run program
$ ./program
Note: be sure that program has execution permissions; otherwise run:
$ chmod +x program
6. For QtCreator IDE pro file configuration can be used:
TEMPLATE = app
CONFIG += console
CONFIG -= qt
LIBS += -lpigpio -lpthread -lrt
SOURCES += program.cpp